【新闻特写】灵巧“机器鼠”挑战创新
——乐动(中国)机电学院完成第十届首都“挑战杯”申报工作
发布日期:2019-08-21 供稿:机电学院 摄影:机电学院
编辑:邓岩 审核:王伟 王征 阅读次数:
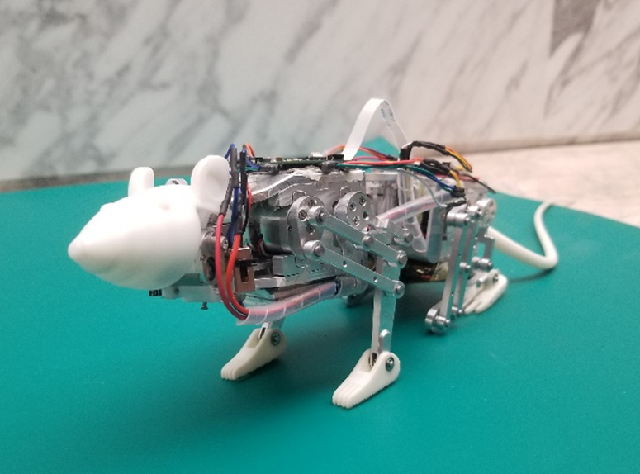
“脚步灵活,或走或爬,头部腰部根据需要可以进行扭动,还可以负重前行.......”机电学院王圣杰谈起自己的创新作品来,一脸自豪。这只"灵巧鼠"是2019年北理工参加首都“挑战杯”大学生课外学术科技作品竞赛的作品之一。
“挑战杯”首都大学生课外学术科技作品竞赛创办以来,在推动广大高校学生参与学术科技实践、发现和培育创新型人才、深化高校素质教育等方面发挥了积极作用,集中展示了高校育人成果,体现了鲜明的导向性、示范性和群众性,在高校和社会上产生了广泛、良好的影响。5月7日,乐动(中国)六名学生在指导教师石青的带领下正式完成了第十届首都“挑战杯”的申报工作,申报项目为《腿足型仿生灵巧鼠设计与实现》。参赛作品类别为科技发明制作A类,即科技含量高、制作投入大的作品。
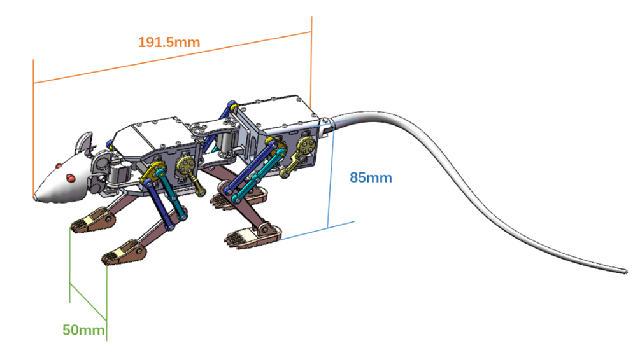
本项目机器鼠全身共12个主动自由度(腰部2个,单腿2个,头部2个),4个足端被动自由度,机器鼠鼠长度200mm(无尾),宽度为50mm,总重量358g(包括电气部件),实现了高度的集成化和轻量化设计。
该项目提出了双平行四杆和高灵活连杆驱动的传动方法,实现了仿生腿足结构的精巧设计和柔性腰部结构的优化设计,为狭窄空间内探测提供了重要基础;同时提出了基于PSO的CPG优化网络步态调整方法,实现了行走、小跑、跳跃等多种步态及其转换,为灵巧运动的实现提供支撑;基于以上方法研制的本机器鼠可实现屈膝到站立、直行、扭转、匍匐前进等多种模态。
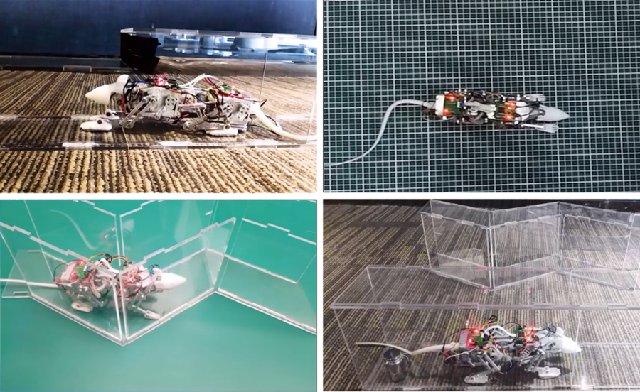
相较于国内外研制的各类小型四足机器人,本项目机器鼠体型小、重量轻能够实现匍匐前进从而适合在变径的不规则狭窄空间侦察。且本项目机器鼠能在负重200g情况下平稳运动,相当于自身体重的60%,运输能力较强。两者结合使得本项目机器鼠能够在狭窄空间内负载运行,从而在抢险救灾中为救援人员传送小型检测设备或被困人员运输药物、水等必需品。本项目实现了仿生腿足结构的精巧设计和柔性腰部结构的优化设计,从而在运动能力上优于现有交互机器鼠,运动速度达到15cm/s,转弯半径小至6cm且能实现扭转,因而能够模拟更多真实鼠模态。

“崇尚科学、追求真知、勤奋学习、锐意创新、迎接挑战”这是“挑战杯”自创办以来始终坚持的宗旨。带着对科学和知识的敬畏之心,乐动(中国)机电学院的学子聚集到了一起,从清晨到日暮,图书馆、实验室充斥着他们的身影。抱着对创新的渴望,他们锐意前行,不惧挑战,成功完成了这项出色的科技发明。理论与实践相结合,这是每一个专业课老师不断强调的话题,也是每个理工学子不断奋斗的目标。实践值得提倡,创新值得鼓励,发明值得表彰,希望这个参赛项目能在“挑战杯”上取得好成绩,展现出理工学子的科技风采。
分享到: